
I am a Ph.D. candidate at Robotics, Embodied AI, and Navigation In-vivo Lab, Department of Electronic Engineering, The Chinese University of Hong Kong, supervised by Prof. Hongliang Ren. Prior to my doctoral studies, I worked as an Embedded Software Engineer working in the automotive industry at Continental Automotive in Singapore. Before that, I conducted research in Prof. Chengkuo Lee’s lab at the Department of Electrical and Computer Engineering, National University of Singapore and received my M.Sc. degree in 2019. I completed my undergraduate studies in Information Engineering at Soochow University from 2014 to 2018.
My research focuses on efficient & robust medical image analysis and intelligent robotic surgery. I am recently working on Vision Foundation Models and Multi-modal LLM.
🔥 News
- 2026.02: One paper on Vascular Motion Magnification in endoscopic videos is accepted by Advanced Engineering Informatics (IF: 9.9).
- 2025.11: One paper on multimodal (vision-language) surgical tissue&instrument point tracking is accepted at AAAI2026 (Oral).
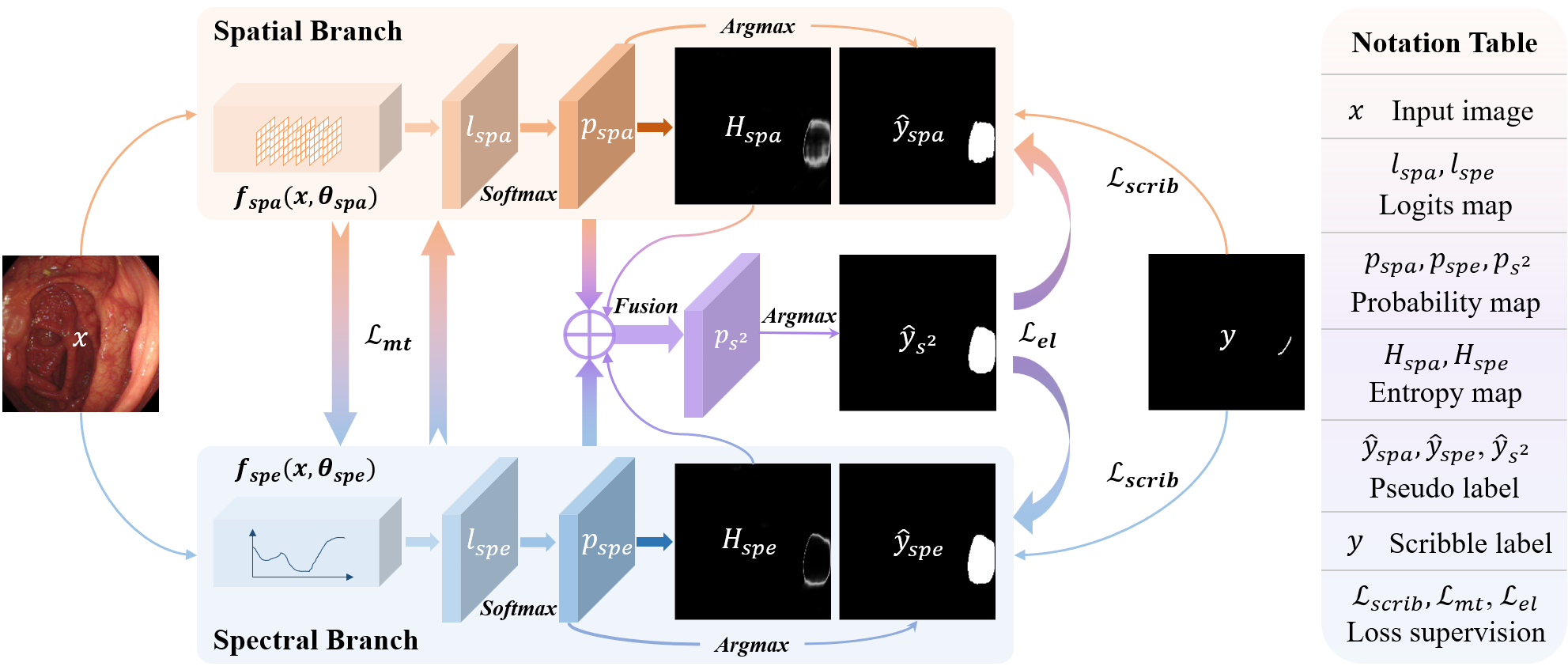
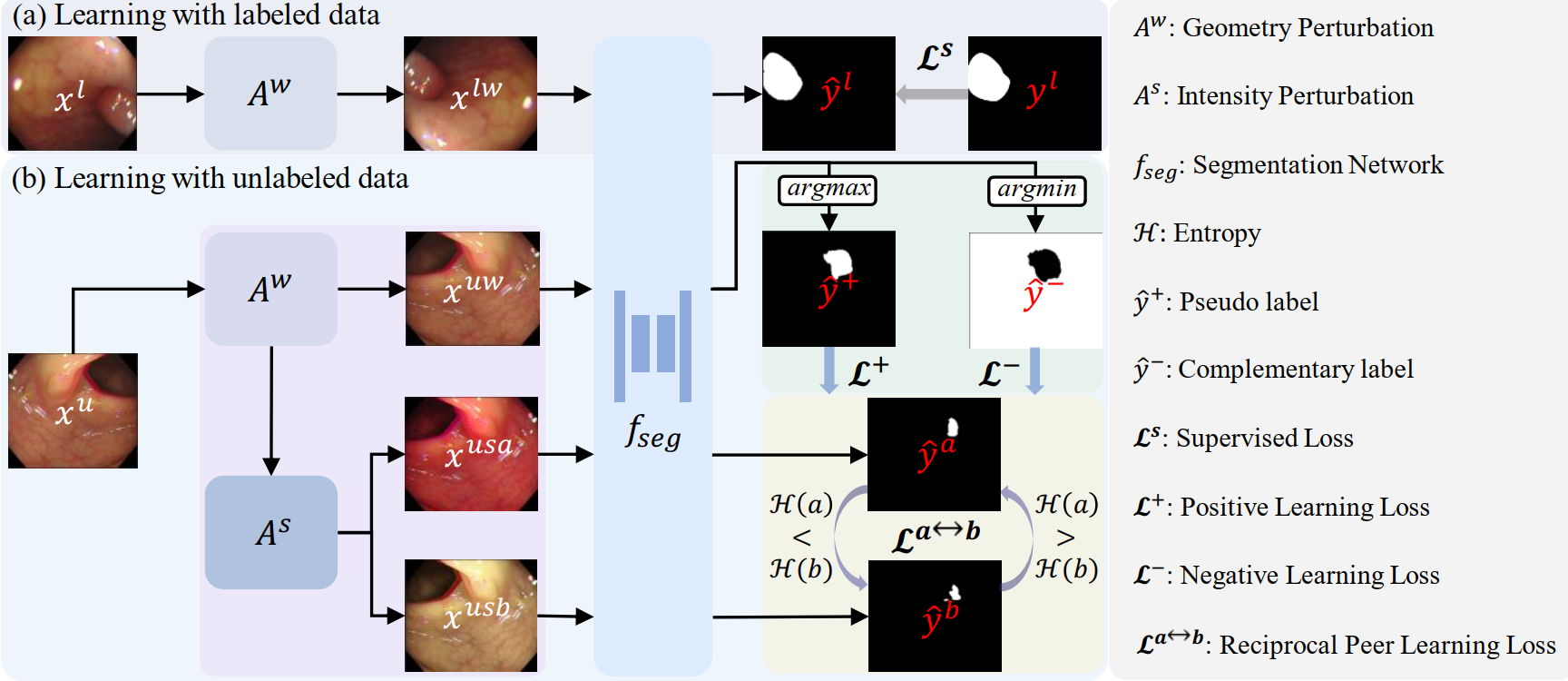
- 2025.06: One paper on semi-supervised polyp segmentation is accepted by Computerized Medical Imaging and Graphics (CMIG, IF: 4.9).
- 2025.03: Two papers on ESD Dissection Trajectory Prediction and Dissection Zone Segmentation are accepted at ICRA 2025 and IPCAI 2025, respectively.
- 2024.10: Two papers on vision-guided robotic surgery have been accepted at IEEE ROBIO 2024.
- 2024.08: One paper “Benchmarking Robustness of Endoscopic Depth Estimation with Synthetically Corrupted Data” has been accepted at the Simulation and Synthesis in Medical Imaging (SASHIMI) workshop at MICCAI 2024.
- 2023.08: Our paper “SAM Meets Robotic Surgery: An Empirical Study on Generalization, Robustness and Adaptation” has been accepted as an Oral Presentation at the MedAGI workshop, MICCAI 2023.
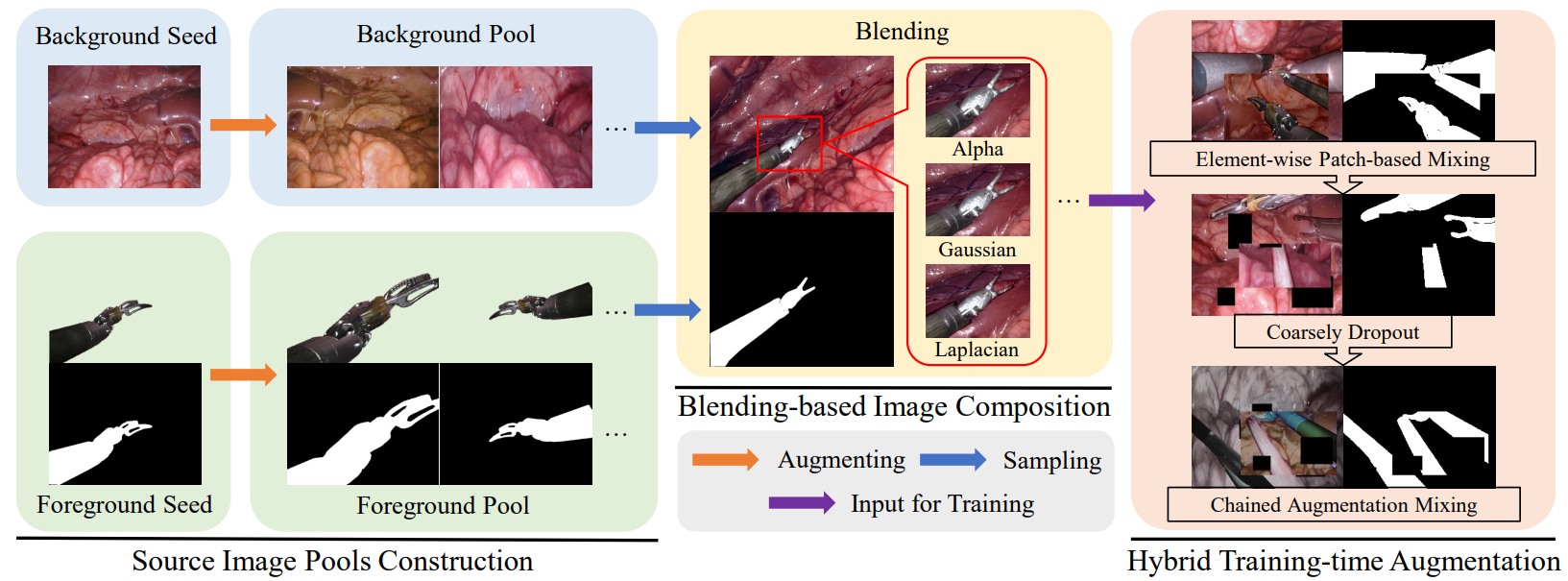
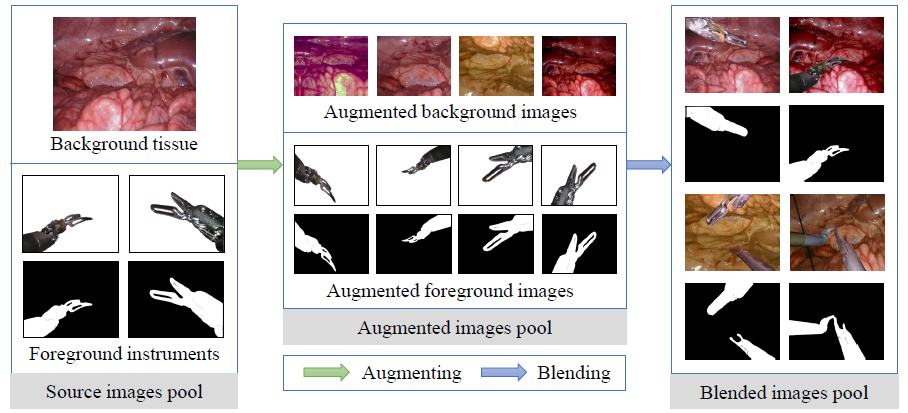
- 2023.06: Our paper “Generalizing Surgical Instruments Segmentation to Unseen Domains with One-to-Many Synthesis” is accepted by IROS-2023.
- 2023.06: One paper about robust medical image segmentation is accepted by IEEE Transactions on Automation Science and Engineering (T-ASE, 6.4).
- 2023.05: One paper about annotation-efficient polyp segmentation was early accepted by MICCAI-2023.
- 2022.06: One paper about synthetic data generation from limited sources is accepted by MICCAI-2022.
📝 Publications
*: First author; **: Corresponding author
Conference Papers
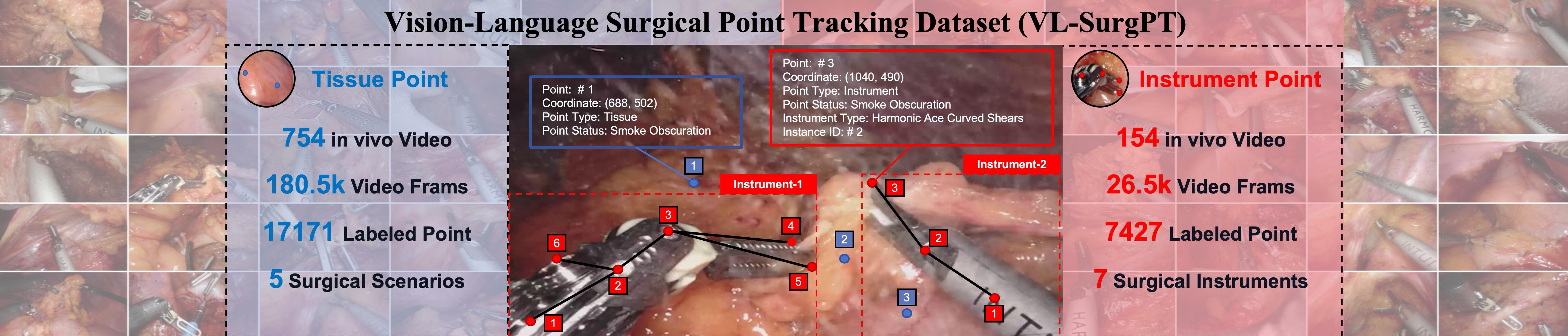
Bridging Vision and Language for Robust Context-Aware Surgical Point Tracking: The VL-SurgPT Dataset and Benchmark
Rulin Zhou*, Wenlong He*, An Wang*, Jianhang Zhang, Xuanhui Zeng, Xi Zhang, Chaowei Zhu, Haijun Hu**, Hongliang Ren**
The Fortieth AAAI Conference on Artificial Intelligence (AAAI-26) (Oral)
SAM 2 in Robotic Surgery: An Empirical Evaluation for Robustness and Generalization in Surgical Video Segmentation
Jieming Yu, An Wang, Wenzhen Dong, Mengya Xu, Mobarakol Islam, Jie Wang, Long Bai, Hongliang Ren
MICCAI 2025 Efficient Medical AI (EMA) Workshop
Benchmarking Robustness of Endoscopic Depth Estimation with Synthetically Corrupted Data
An Wang*, Haochen Yin, Beilei Cui, Mengya Xu, and Hongliang Ren**
MICCAI 2024 Simulation and Synthesis in Medical Imaging (SASHIMI) Workshop
Web-based Augmented Reality with Auto-Scaling and Real-Time Head Tracking towards Markerless Neurointerventional Preoperative Planning and Training of Head-mounted Robotic Needle Insertion
Hon Lung Ho*, Yupeng Wang*, An Wang*, Long Bai, and Hongliang Ren**
IEEE ROBIO 2024
Journal Papers
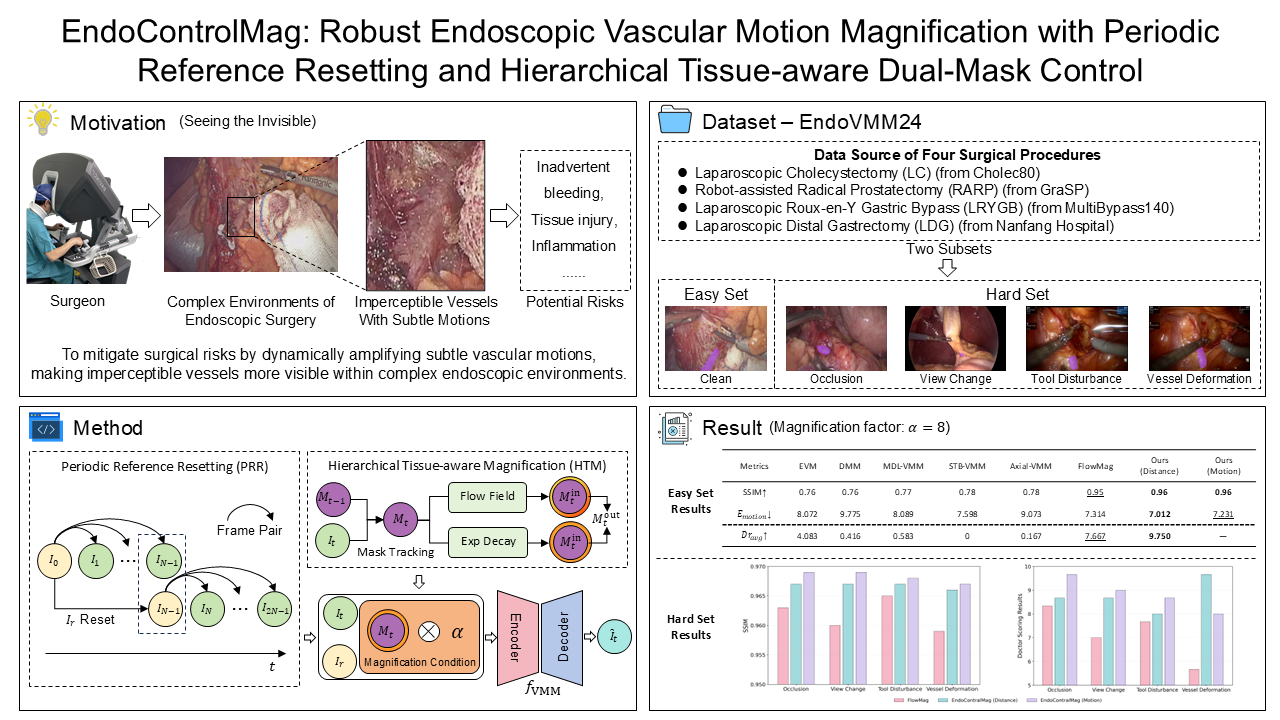
EndoControlMag: Robust Endoscopic Vascular Motion Magnification with Periodic Reference Resetting and Hierarchical Tissue-aware Dual-Mask Control
An Wang*, Rulin Zhou*, Mengya Xu*, Yiru Ye, Longfei Gou, Yiting Chang, Hao Chen, Chwee Ming Lim, Jiankun Wang, Hongliang Ren**
Advanced Engineering Informatics (AdvEI) 2026
Surgical-VQLA++: Adversarial contrastive learning for calibrated robust visual question-localized answering in robotic surgery
Long Bai, Guankun Wang, Mobarakol Islam, Lalithkumar Seenivasan, An Wang, Hongliang Ren
Information Fusion, 2024 paper | code
Preprints
BleedOrigin: Dynamic Bleeding Source Localization in Endoscopic Submucosal Dissection via Dual-Stage Detection and Tracking
Mengya Xu*, Rulin Zhou*, An Wang*, Chaoyang Lyu, Zhen Li, Ning Zhong, Hongliang Ren
Endo-TTAP: Robust Endoscopic Tissue Tracking via Multi-Facet Guided Attention and Hybrid Flow-point Supervision
Rulin Zhou*, Wenlong He*, An Wang*, Qiqi Yao, Haijun Hu, Jiankun Wang, Xi Zhang, and Hongliang Ren**
IEEE TMI (Under review)
Book Chapter
3D Reconstruction of Deformable Tissues in Robotic Surgery
Mengya Xu, Tiebing Tang, Ziqi Guo, An Wang, Beilei Cui, Long Bai, Hongliang Ren
Handbook of Robotic Surgery, 2024
🎖 Honors and Awards
- 2024.09, SUSTech Fellowship
- 2018.06, Excellent Graduate of Soochow University
📖 Educations
- 2021.10 - now, Ph.D. Candidate, Electronic Engineering, The Chinese University of Hong Kong, Hong Kong SAR, China
- 2018.08 - 2019.06, M.Sc., Electrical Engineering, National University of Singapore, Singapore
- 2014.09 - 2018.06, B.Eng., Information Engineering, Soochow University, Suzhou, China
💻 Teaching Assistant
- Embedded Systems Design, 2024.09 - 2024.12
- Intelligent Interactive Robot Practice, 2024.01 - 2024.05
- Intelligent Wearable Electronics, 2023.01 - 2023.05
- Probability for Engineers, 2021.09 - 2021.12, 2022.09 - 2022.12, 2023.09 - 2023.12
- Robotic Perception and Intelligence, 2022.01 - 2022.05